CN1168738A - 微型机械记忆传感器 - Google Patents
微型机械记忆传感器 Download PDFInfo
- Publication number
- CN1168738A CN1168738A CN95194455.XA CN95194455A CN1168738A CN 1168738 A CN1168738 A CN 1168738A CN 95194455 A CN95194455 A CN 95194455A CN 1168738 A CN1168738 A CN 1168738A
- Authority
- CN
- China
- Prior art keywords
- transducer
- skew
- latching member
- locking
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 62
- 238000001514 detection method Methods 0.000 claims abstract description 28
- 230000007246 mechanism Effects 0.000 claims abstract description 21
- 239000000463 material Substances 0.000 claims description 20
- 239000000758 substrate Substances 0.000 claims description 18
- 230000005611 electricity Effects 0.000 claims description 8
- 230000003068 static effect Effects 0.000 claims description 5
- 238000007599 discharging Methods 0.000 claims 4
- 238000012360 testing method Methods 0.000 description 30
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 27
- 238000000034 method Methods 0.000 description 27
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 21
- 229920005591 polysilicon Polymers 0.000 description 21
- 229910052710 silicon Inorganic materials 0.000 description 19
- 239000010703 silicon Substances 0.000 description 19
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 18
- 238000004519 manufacturing process Methods 0.000 description 17
- 229910052751 metal Inorganic materials 0.000 description 16
- 239000002184 metal Substances 0.000 description 16
- 229910052581 Si3N4 Inorganic materials 0.000 description 14
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 14
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 13
- 235000012431 wafers Nutrition 0.000 description 13
- 238000012545 processing Methods 0.000 description 12
- 238000005516 engineering process Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 239000000377 silicon dioxide Substances 0.000 description 9
- 238000000465 moulding Methods 0.000 description 8
- 238000005452 bending Methods 0.000 description 7
- 229910052759 nickel Inorganic materials 0.000 description 6
- 235000012239 silicon dioxide Nutrition 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000001259 photo etching Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- 239000012528 membrane Substances 0.000 description 4
- 229920002120 photoresistant polymer Polymers 0.000 description 4
- KWYUFKZDYYNOTN-UHFFFAOYSA-M Potassium hydroxide Chemical compound [OH-].[K+] KWYUFKZDYYNOTN-UHFFFAOYSA-M 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 238000001020 plasma etching Methods 0.000 description 3
- 239000007858 starting material Substances 0.000 description 3
- KRHYYFGTRYWZRS-UHFFFAOYSA-N Fluorane Chemical compound F KRHYYFGTRYWZRS-UHFFFAOYSA-N 0.000 description 2
- 230000002146 bilateral effect Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000002349 favourable effect Effects 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- 238000009413 insulation Methods 0.000 description 2
- CNQCVBJFEGMYDW-UHFFFAOYSA-N lawrencium atom Chemical compound [Lr] CNQCVBJFEGMYDW-UHFFFAOYSA-N 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005498 polishing Methods 0.000 description 2
- 238000007634 remodeling Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 206010019332 Heat exhaustion Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 238000007772 electroless plating Methods 0.000 description 1
- 230000009881 electrostatic interaction Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
Images






























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0891—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values with indication of predetermined acceleration values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0808—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate
- G01P2015/0811—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass
- G01P2015/0814—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining in-plane movement of the mass, i.e. movement of the mass in the plane of the substrate for one single degree of freedom of movement of the mass for translational movement of the mass, e.g. shuttle type
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H1/00—Contacts
- H01H1/0036—Switches making use of microelectromechanical systems [MEMS]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H1/00—Contacts
- H01H1/0036—Switches making use of microelectromechanical systems [MEMS]
- H01H2001/0042—Bistable switches, i.e. having two stable positions requiring only actuating energy for switching between them, e.g. with snap membrane or by permanent magnet
- H01H2001/0047—Bistable switches, i.e. having two stable positions requiring only actuating energy for switching between them, e.g. with snap membrane or by permanent magnet operable only by mechanical latching
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H37/00—Thermally-actuated switches
- H01H2037/008—Micromechanical switches operated thermally
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H61/00—Electrothermal relays
- H01H2061/006—Micromechanical thermal relay
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H35/00—Switches operated by change of a physical condition
- H01H35/14—Switches operated by change of acceleration, e.g. by shock or vibration, inertia switch
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H35/00—Switches operated by change of a physical condition
- H01H35/24—Switches operated by change of fluid pressure, by fluid pressure waves, or by change of fluid flow
- H01H35/34—Switches operated by change of fluid pressure, by fluid pressure waves, or by change of fluid flow actuated by diaphragm
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H37/00—Thermally-actuated switches
- H01H37/02—Details
- H01H37/32—Thermally-sensitive members
- H01H37/52—Thermally-sensitive members actuated due to deflection of bimetallic element
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H37/00—Thermally-actuated switches
- H01H37/74—Switches in which only the opening movement or only the closing movement of a contact is effected by heating or cooling
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H61/00—Electrothermal relays
- H01H61/02—Electrothermal relays wherein the thermally-sensitive member is heated indirectly, e.g. resistively, inductively
Abstract
一种微型机械记忆传感器,包括闭锁件装置(20,30),当检测到可变的条件(环境温度、加速度和压力)的门限值时,机械地闭锁。机械闭锁被读出机构电路(21、22)检测。传感器还包括复位机构,例如热电阻(24),检测质量(52,101)或静电梳驱动装置(170,175),用于以电的方式释放闭锁件装置,借以使传感器在其操作状态下被纯机械地闭锁并以电的方式复位,以便重新使用。
Description
本发明涉及一种微型机械记忆传感器。更具体地说,本发明涉及一种作为机械记忆锁存器或传感器的微型机械装置,其启动由条件的变化触发,例如,温度、加速度与/或压力。记忆锁存器的内容可以在锁存之后的任何时间被方便地检测。这种装置可以用电子方式复位,因此它可以被方便地再使用。
虽然本发明具体地涉及微型机械记忆传感器,并且将对其进行专门说明,但是,应该理解,本发明也可以用于其它的领域和用途。
微型机械记忆传感器被用于或可能被用于不同变量或条件的变化。这些变量或条件包括温度、加速度、压力、力…等等。
例如,一种适用于纯机械地检测温度极限并可用电子方式复位的微型机械记忆传感器对于这样一些应用是有利的,其中对产品进行现场测试,并且在现场没有可被利用的电源。然而,尚未知道有这种类型的微型机械记忆传感器。
常规的电子温度传感器当监视温度时需要电源。然而,在大多数产品经受的温度极限是所要求的信息的情况下,用常规技术进行温度的现场监视是不可能的,这是因为经常没有可被利用的电源。
一种具有电源或电池的双稳态吸合式微型启动器已经被披露了。见H.Matobo,T.Ishikawa,C.Kim,R.Muller,A Bistable SnappingMicroactivator,I.E.E.E.,January 1994,pp.45-50。这种微型启动器包括一个可弯曲的悬臂,当由电流引起的温度极限被检测到时,悬臂弯曲。虽然这种装置主要由温度变化,即电阻消耗触发,但是,只能通过以特定时序提供的驱动电压和电流脉冲才能实现可接受的操作。这种微型启动器不能用纯机械方式触发。
作为另一个例子,已知一种用作闭锁加速度计(latchaccelerometer)并通过使用微型机械记忆传感器提供廉价的检测中、高g加速度的方法的微型机械记忆传感器。闭锁加速度计是一种开关,它在被以特定方向的预定的加速度加速时便闭合,并且在加速停止之后仍保持闭合。闭锁加速度计和常规的加速度检测装置相比的主要优点在于,闭锁加速度计不需要复杂的检测电子电路。在加速事件之后的长时间内,可以读出检测的加速度。闭锁加速度计不用电压操作,并可在从几g到几千g的范围内的g值上操作,并可以检测加速持续的时间。
Ciarlo的美国专利No.4,891,255披露了一种加速度闭锁装置,它通过对(110)取向的硅片进行整体微型机加工,制成两个悬臂梁,其上具有检测质量或试验板,在设定的阈值加速度下,悬臂梁互锁。图21(a)和21(b)表示这种闭锁加速度计,悬臂梁C的长度一般为几毫米。悬臂梁C和检测质量P的制造是相当复杂的,因为要使用拐角补偿(corner compensation)和(110)晶片的硅整体微型机加工。(110)整体微型机加工不容易和IC工艺兼容。
Ciarlo专利的悬臂在在其检测质量C上闭锁之前,必须经受大的偏转。此外,因为水平的悬臂梁C必须强制垂直悬臂梁C偏转,这涉及两个大的表面的滑动,两个检测质量P之间的摩擦力可能相当大,因而引起检测的加速度的不稳定性。此外,悬臂梁C不能释放,这样便不能复位。
Ciario专利的闭锁装置的另一个主要缺点是必须使用复杂的读出方法。因为悬臂梁C通过蚀刻硅片制成,两个悬臂梁C不能在电气上绝缘,使得在两个悬臂梁之间不能进行简单的连续性试验,Ciarlo专利的读出方法使用电容或光技术。在这些方法中,加速度计晶片必须被夹在含有电容极板或发光二极管的两个其它晶片之间,以便检测悬臂的位置。这使得制造过程更加复杂和昂贵。此外,整体微型机加工使器件的体积加大。
使用表面微型机加工的Ciarlo专利的闭锁机构的直接实现是可能的,并且可以解决检测闭锁的问题。然而,器件仍然具有其它严重问题,这些问题和其端部联接有检测质量P的梁C的长度过长有关,并且仍然不能复位。
发明概述
本发明的目的在于提供一种微型机械记忆传感器,包括一个检测变量或条件变化的闭锁装置。
本发明的另一个目的在于提供一种能够响应检测到的条件或变量的门限值纯机械地闭锁的微型机械记忆传感器。
本发明的另一个目的在于提供一种微型机械记忆传感器,包括记忆闭锁装置,其内容可在闭锁之后的任何时间被检测。
本发明的另一个目的在于提供一种能够复位的微型机械记忆传感器。
在本发明的一个方面中,微型机械记忆传感器记录经历的超过预设值的温度极限,不使用任何电源。就是说,传感器被纯机械地诱发。此外,这种传感器是可复位的,小体积和廉价的。
在本发明的另一方面中,微型机械记忆传感器记录所经历的超过预设值的加速度极限,不使用任何电源。这种传感器被纯机械地诱发。此外,这种传感器是可复位的,小体积和廉价的。
在本发明的另一个方面中,微型机械记忆传感器记录所经历的超过预设值的压力极限,不使用任何电源。这种传感器被纯机械地诱发。此外,这种传感器是可复位的,小体积和廉价的。
本发明的其它优点和应用范围从下面的详细说明中会看得更加清楚。不过,应该理解,这些详细说明和特定例子,虽然表示发明的最佳实施例,但是仅以说明的方式给出,因为本领域的技术人员将会看出,在本发明的构思和范围内,可以作出各种改变和改型。
附图简介
本发明在于器件的各部件的结构、排列和组合,借以实现后面更充分地提出的预期的目的。这些在权利要求中将专门提出,并结合附图说明,其中:
图1(a)-(d)说明本发明的示例的实施例的闭锁过程;
图2(a)-(d)说明本发明的图1(a)-(d)示例的实施例的复位过程;
图3是本发明的微型机械记忆传感器的侧向截面图;
图4图(a)-(p)表示图3的传感器的制造步骤;
图5是图3微型机械记忆传感器的另一实施例的截面图;
图6是图3微型机械记忆传感器的另一实施例的截面图;
图7是本发明的微型机械记忆传感器的另一实施例的截面图;
图8(a)-8(g)是图7的传感器的制造步骤;
图9是图7的微型机械记忆传感器的另一实施例的截面图;
图10是图7的微型机械记忆传感器的另一实施例的截面图;
图11(a)-(c)是用于检测加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图12(a)-(c)表示使用多晶硅表面微型机加工的图11(a)-(c)的传感器的制造步骤;
图13(a)-(c)表示使用镍表面微型机加工的图11(a)-(c)的传感器的制造步骤;
图14是用于检测一个方向上的加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图15是用于检测两个方向上的加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图16是用于检测加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图17是用于检测一个方向上的加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图18(a)-(b)分别是平面内闭锁方向和平面外闭锁方向的仿效表示;
图19是用于检测平面外的加速度的本发明的微型机械记忆传感器的另一实施例的顶视图;
图20是具有复位机构的图19的微型机械记忆传感器的顶视图;以及;
图21(a)-(b)分别是在闭锁和未闭锁状态下的现有技术的加速度闭锁装置。
实施例的详细说明
本发明涉及一种微型机械记忆传感器,它具有各种可能的用途,其中包括,在本发明的一个方面中,检测传感器经受的温度极限,在另一个方面中,检测传感器经受的加速度极限,在另一个方面中,检测传感器经受的压力极限。这种传感器包括闭锁装置,它由在所选温度、加速度、压力...等等条件下检测到的预定门限或极限触发。
现在参看更加具体的附图,其中这些附图只用于说明本发明的最佳实施例,并不用来限制本发明。图1(a)-(d)说明本发明的原理,具体地说,传感器闭锁装置L包括检测机构S它检测外力或变量F,当外力F超过闭锁装置被校准的预定极限值时,机构S在复位机构R的下面闭锁。虽然机构R和S一般表示为沿同一轴线纵向设置的梁,应该理解,其它合适类型的机构和设置也可以使用,其中一些较佳的形式将在后面讨论。此外,加在机构S上的力可以是温度变化、加速度变化、压力变化等引起的。同样,机构S的实际运动可以由利用关于双金属效应、质量运动、膜特性之类的原理产生。
注意,闭锁完全用机械方式完成。就是说,为了检测这些极限,不需要电源。当需要在现场使用或检测期间收集产品、样机或其它装置所处的各个极端条件的信息时,这一特点尤其有用。一般地说,在现场使用或试验期间,不容易得到电源。例如,当轮胎被试验时,重要的是检测受试轮胎经受的温度,在使用期间在轮胎上放置一个电源进行试验是不现实的。因而,本发明的传感器是有用的。
按照本发明,一旦检测到极限条件,并且传感器已经闭锁之后,如图1(d)所示,传感器就保持闭锁。这特点提供了所检测的极限条件的记忆。
此外,本发明包括读出机构或试验端口,通过它可以确定传感器是否已闭锁。一种方便的读出方法,即导电性试验或其类似方法,不需要视觉检测和复杂的读出电子电路。如果许多传感器被制造在一个基片上,用简单的多路转换电路可以选择地确定传感器是否闭锁。一个简单的读出方法的优点体现在现场试验的产品中,其中检测器可方便地在现场或在试验或使用之后在实验室中读出。
如图2(a)-(d)所示,本发明的微型机械记忆传感器可以复位。复位机构R最好是微型致动装置,用来使检测机构R释放。在所述的方法中,使机构R弯曲到使机构S滑过机构R返回其原始位置的程度,机构R可通过热(双金属)、压电、或静电作用被微量致动。
可复位性使传感器能再被使用。不过,按照本发明的传感器的结构是简单和经济的。因而,本传感器也可以一次性使用,而不管有无复位特点。
在图1(a)-2(d)中,说明了本发明的一般实施例和构思。以后的说明提出本发明的特定例子。首先,将说明主要由整体微型机加工构成的各个实施例(图3-10)。其次,将说明主要由表面微型机加工构成的实施例(图11(a)-20)。
现在参看图3,用于检测温度的一个较佳实施例,微型机械记忆传感器10包括复位梁20,试验端口21,检测梁30,和支撑结构40、50。梁20和30沿同一纵向轴线设置。不过,梁30比梁20更易弯曲。此外,梁20和30重叠,使得检测梁30对着复位梁20的p+硅部分26的第一表面25。
复位梁20包括金属层22。它最好是金的。不过,任何和制造工艺兼容的金属都是合适的。复位梁20还包括多晶硅热电阻24和p+硅部分26。金属层22,热电阻24和p+硅部分26被两个氮化硅(Si3N4)层28和29分别分开。
在梁20中,p+硅部分26延伸到金属层22,热电阻24和氮化硅(Si3N4)层28和29的端部之外。p+硅部分26的延伸具有上述的第一表面25,和第二表面27。
检测梁30包括金属层32。和金属层22一样,金属层32最好是金的,不过,任何和制造工艺兼容的金属都是合适的。检测梁30还包括n-型多晶硅层34和氮化硅(Si3N4)分隔层38和39。
试验端口21和梁20上的部分26以及梁30上的层32相连。这些试验端口可以是任何已知类型的和导电试验兼容的端口,本领域的技术人员是熟知的。
支撑结构40和50由硅基片制成,并具有包括氮化硅层62,66和多晶硅层64的部分60。本领域的技术人员应该理解,虽然硅基片最便于使用,但也可以使用其它的具有相同性能的材料,这仍然属于本发明的范围。
此外,在操作中,图3的传感器10利用双金属效应,它是由分别具有不同热胀系数的金属层22、32和硅层24、34产生的。如图3所示,两个梁20和30是双金属的。因此,当温度变化时,两个梁20和30弯曲。
更具体地说,参看图1(a)-(d),其中机构R相应于梁20,机构S相应于梁30,当环境温度增加时,两个梁20、30开始弯曲。因为检测梁30比复位梁20更易弯曲,又由于不同的几何尺寸,例如长度、厚度和宽度,它比梁20弯曲的量较大。在这过程中,检测梁30接触复位梁20。因而,如图1(b)所示,由于接触检测梁30施加的力,在复位梁20中引入附加的弯曲力矩。
当环境温度超过预定温度时,梁20、30的水平偏移超过其初始重叠。这使检测梁30滑动脱离开复位梁20,如图1(c)所示。因为检测梁30比复位梁20更易弯曲,在滑动发生之后,它比梁20有一个大的垂直偏移,也如图1(c)所示。
最后,当环境温度返回室温时,梁20、30将返回其初始位置而没有任何垂直偏移。然而,检测梁30将以闭锁方式闭锁在复位梁20下面,如图1(d)所示,并和复位梁20接合。因此,传感器10记录下了其设计要检测的温度极限已被超过这一事实。温度极限实际上是检测梁30滑动脱离开复位梁20时的温度。
应该理解,虽然温度变化引起各个梁20、30的弯曲力矩,产生垂直偏移,但是,垂直偏移同样会引起水平偏移,因为在温度增加期间梁的长度基本保持常数。热膨胀对梁的长度的影响比由垂直偏移引起的水平偏移是微小的。
可以进行简单的导电试验来确定梁20、30是否闭锁。如图3所示的试验端口或读出机构21被置于传感器上的方便位置。如上所述,如果许多传感器被制造在一个基片上,则使用简单的多路转换电路来选择性地检查传感器是否闭锁。
具体地说,如果检测梁30闭锁在复位梁20的下面,检测梁30的金属层32则将和复位梁20的p+硅部分26接触,使电路闭合。这接触是欧姆接触,因此,产生和通过的电流成比例的电位差。欧姆接触是通过试验端口21或相关的多路转换电路的操作而被检测。
然而,如果检测梁30没有闭锁在复位梁20下面,而只是刚刚碰到它,例如在温度稍微高于室温(该室温低于预设值)的情况下,将发生开路。梁30的多晶硅层34碰到p+硅部分26的表面25。各个试验端口因而被不导电的路径分开。结果,用户可以通过操作试验端口或相关的电路容易地识别两种不同的接触类型,因而可以识别是否已发生闭锁。
本领域的技术人员应该理解,如果图3中的传感器10处于图1(a)所示的状态下,导电试验将同样表明存在开路。这表明没有检测到温度极限,传感器10没有闭锁。
如上所述,当环境温度超过预定值时,传感器10闭锁(图1(d))。应该理解,能使传感器复位是有利的。然而,也容易理解,微型机械记忆传感器10可以设计成一次性和不能复位的。
现在参看图2(a)-(d)说明复位方法,其中机构R相应于梁20,机构S相应于梁30。如上所述,热电阻24被设置在复位梁20上。当使电流通过热电阻24时,产生的热量耗散在复位梁20上。由热电阻24产生的热量对检测梁30的影响很小,因为在复位梁20和检测梁30之间的导热性很小。然而,在任何情况下,导热性将不会引起复位装置的误动作,如下所述。因此,复位梁20将开始垂直弯曲,并在检测梁30上产生弯曲力矩,如图2(b)所示。
最后,热电阻24消耗的功率将足够大到使两个梁的水平偏移大于其初始重叠的程度。这将使复位梁20滑动脱离检测梁30,如图2(c)所示。因而,检测梁30将弹回其初始位置,因为在它上面没有热量消耗。一旦由于不和检测梁30接触而使热电阻24中的电流开路,复位梁20就不再经受温度上升。因而,复位梁20将弯到其初始位置,如图2(d)所示,使整个传感器10返回其初始位置。
对利用双金属效应的复位方法已经进行了说明。然而,其它的热装置或使用压电材料的装置以及使用电极的装置也可以使用。此外,使用结合图20说明的装置可以完成静电复位。
虽然对检测高的极限的传感器进行了说明,应该理解,也可以检测低的极限。更具体地说,在另外的实施例中,检测器被预闭锁,使得检测梁30闭锁在复位梁20下面,如图2(a)所示。随着温度的减小梁30将向上偏转,并趋于滑脱梁20。一旦到达低温极限,这些梁将完全释放。然后可以进行简单的导电试验,检测传感器是否已释放。
现在参看图4(a)-(p),其中标号被增加了200,并代表同一元件,图3所示的器件的制造从双侧抛光的(100)取向硅晶片开始,在其底面和顶面上有氮化硅薄膜262(图4(a))。氮化硅262然后使用光刻技术和反应离子刻蚀成型(图4(b))。然后生长并成型二氧化硅层211,用作p+扩散的掩模226(图4(c)-(e))。在p+扩散后,除去二氧化硅(图4(f)),然后淀积氮化硅219并被成型为部分229和239(图4(g)-(h))。然后在除去氮化硅的地方生长二氧化硅层217(图4(i))。然后淀积多晶硅244并掺入杂质(图4(j))。接着淀积氮化硅层248(图4(k))。氮化硅和多晶硅被成型,形成部分224,228,234,和238,并进行氧化以便绝缘(图4(l)-(m))。接着溅射形成金属层(例如Cr/Au),并成型为部分222和232(图2(n))。从背面进行整体刻蚀,然后释放牺牲的二氧化硅层(图4(o)-(p))。注意,处理的结果形成了包括氮化硅和硅的层260。
现在参看图5,其中示出了用于检测加速度极限的记忆传感器的另一个实施例。如同本领域的技术人员理解的那样,除去在检测梁30的底部制造检测质量52之外,这种传感器在结构和制造上基本和图3的传感器10相同。不仅通过结合图3所述的实施例中的双金属效应的操作,而且通过质量运动和惯性的操作来检测垂直方向上的加速度极限。当加速度增加时,检测质量52沿预定方向的运动使梁30弯曲,因而,当检测到极限时,在梁20下面闭锁。
类似于图3的实施例,使用试验端口21进行简单的导电试验,确定传感器是否闭锁,并用热电阻24(或其它的热的压电的或静电技术)使器件复位。
图6说明一种微型机械记忆传感器,除去检测压力之外,其在结构和制造上和图3、图5的相同。具体地说,检测梁30和复位梁20被设置在由类似于图3的部分26的p+硅构成的膜54上。当垂直方向的压力使膜弯曲或压下时,在检测到预定的压力极限时,梁30闭锁在梁20的下面。
如同本领域的技术人员理解的那样,可以使用试验端口21进行简单的导电试验来确定器件的闭锁,并且可以用热、双金属、压电或静电的方式使器件复位。此外,如果传感器在开始时是闭锁的,可以检测相反的垂直方向上的压力。
图7表示本发明的另一个实施例。和所有的图一样,相同的标号相应于相同结构的元件,虽然特定层的成分可能不同。如图所示,图7的传感器10除了不包括p+硅部分26并且没有延伸到梁20的其余层之外,和图3的相同。通过梁30的金属延伸36在传感器10的梁20和20之间发生重叠。另外,部分60的成分和图3的实施例不同,二氧化硅层37分别被淀积在支撑40、50和梁20、30之间,并且部分23被淀积在梁20的下端面上。部分23对于读出是有用的,如下所述。
应该理解,图3和图7的传感器10由于结构的不同在操作上只有细微的区别。例如,图3的传感器10包括第一表面25(在温度增加时,它和梁30接触)和第二表面27(梁30最后闭锁在其下面)。另一方面,图7的传感器10包括延伸36,在检测到门限温度时它闭锁在梁20的下面,并接触部分23。
为了确定闭锁,利用试验端口21进行简单的导电试验。在本实施例中,试验端 21连接于金属层22和32。如果已经闭锁,则延伸部分36接触部分23,一个闭合电路形成通过层24的导电通路。如果没有闭锁,则出现开路。
和结合图2说明的一样,使用热电阻24(或其它热的、压电的或静电的技术)使在图3的器件上的检测器复位。此外,如果检测器起初是闭锁的,则可以检测低温极限。
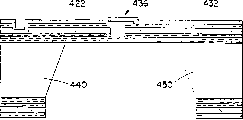
现在参看图8(a)-(g),其中标号增加了400,并且表示同一元件。图7中器件的制造从双侧抛光的具有二氧化硅薄膜437和氮化硅薄膜449的(100)取向硅晶片开始(图8(a))。第一步包括使用光刻和反应离子刻蚀技术在其前面成型氮化硅薄膜,从而形成部分429和439(图8(b))。接着在前侧和后侧淀积并成型多晶硅424、423、434和氮化硅428、438(图8(c))。然后,进行光刻,从而留下光刻胶牺牲层(photoresist sacrificial layer)417(图8(d))。然后溅射金属层422、432和436,并进行成型(图8(e))。注意,在金属被成型之后,除去所有的光刻胶417。然后进行整体刻蚀并通过除去二氧化硅层进行脱模(图8(f)-(g))。注意,在制造过程中形成了部分460。
图9和图10表示图7的传感器10的另一实施例,分别表示和图5,图6类似的加速度闭锁装置和压力闭锁装置。它们的操作基本上和结合这些图描述的相同。和图9,图10的实施例有关的制造过程和结合图8(a)-(g)所述的相同,正如本领域的技术人员应该理解的那样。事实上,为了获得图9的传感器,除去形成质量52之外,使用相同的处理。
在图3、5、6、7、9和10的器件的制造期间,在薄膜中产生了剩余应力。在脱模步骤之后,这些应力要释放。因而,如果剩余应力是拉力,膜将向上弯曲,如果是压力,则向下弯曲。这剩余应力用于调整器件的灵敏度。例如,如果梁沿向下方向具有初始偏移,对于一个同样的小的温度(或加速度或压力)增加,和梁是平的时候相比,则应当具有较大的水平端部偏移。这就是说,梁上的较高的应力使初始偏移增加。因此,这种应力可用于增加灵敏度。
图11(a)表示微型机械记忆传感器的另一较佳实施例,即使用表面微型机加工制造的加速度闭锁装置100的整体图。虽然闭锁装置100的结构化配置看来和图3、5、6、7、9、以及10的不同,但是,结合图1(a)-2(d)所述的基本思路同样适用。这就是说,这种传感器在检测到外力的极限时机械地闭锁,并使用简单的导电试验检验闭锁,并用电的方式复位。
如图所示,加速度闭锁装置100包括被4个折叠臂102支撑着用硅或镍制成的矩形板或检测质量101。折叠臂102帮助释放闭锁装置100中的应力。
当板101经受加速度时,板101的延伸的部分或阳闭锁件103推两个扇形结构104a和104b,因而,分别推动两个悬臂梁105a和105b彼此分开,如图11(b)所示。结构104a-b和105a-b的组合作为和阳闭锁件相应的阴闭锁件。
扇形的端部104a和104b是等高的从而只提供和延伸部分103的线接触,以便使滑动摩擦最小。如果加速度超过某一门限值,延伸部分103因而板101便闭锁在悬臂梁105a和05b的扇形端部104a和04b上,并保持闭锁,如图11(c)所示。
加速度闭锁装置100检测范围为几百g到几千g的加速度,并具有长度为200到400μm的折叠臂,200到400μm的板101以及100到200μm长的悬臂105a和105b。这些尺寸形成的加速度闭锁装置小于一平方毫米。
对于较小的g,悬臂105a和105b的长度可以增加,并且可以通过在多晶硅板的顶部无电敷镀金属镍来增加板101的质量。为了检测较大g的加速度(几千g),可以增加悬臂105a和105b的刚度。
为闭锁所需的延伸部分103和扇形结构104之间接触的时间的长度可以增加,从而使器件100对较小持续时间的振动不敏感。通过使板101的延伸部分103在其开始推动悬臂105a和105b的端部附近的扇形结构104a和104b之前,移动较大的距离,也可以到达同样效果。通过控制这些不同的方面,可以检测从几个到几千个g的加速度范围。
通过在作为试验端口或读出机构的焊盘(pad)106和107a-d之间进行导电试验来证实闭锁。这是可能的,因为悬臂105a-b和板101开始是电气绝缘的。和电容或光学检测相比,这是简单的。
图11(a)-(c)(以及后面所述的图14-20)的闭锁装置100由硅基材料构成。本领域的技术人员应该理解,在较佳的微型机加工技术中,使用这种材料是方便的。
图11(a)的器件(以及后面的图14-20)使用和IC处理技术兼容的工艺,即(100)硅晶片的表面微型机加工制成。传感器100的机械元件通过成型所需厚度(一般2-5微米)的多晶硅层制成。这种多晶硅层被淀积在所需厚度的牺牲氧化物层上,而后者又被沉积在硅晶片上。只用一个成型步骤就足够了。其它的材料,例如镍,也可以用来代替多晶硅。
具体地说,参看图12(a)-(c)和13(a)-(c),表面微型机加工的加速度闭锁装置可以通过使用多晶硅或镍表面微型机加工工艺制造。关于图12(a)-(c),多晶硅表面微型机加工技术从具有二氧化硅薄膜810和多晶硅薄膜820的硅晶片开始,(图12(a))。然后,用光刻技术和反应离子刻蚀技术使多晶硅成型(图2(b))。然后,包括检测质量101的加速度闭锁装置100在氢氟酸中脱模,留下悬着的板101和相关的梁(图12(c))。
现在参看图13(a)-(c),镍表面微型机加工技术从具有二氧化硅和多晶硅的薄膜940的硅晶片开始(图13(a))。然后,进行光刻步骤,沉淀光刻胶930,并镀上镍(图13(b))。然后除去光刻胶并在硅刻蚀剂中(例如氢氧化钾)除去牺牲的多晶硅层,留下悬着的板101和相关的梁(图13(c))。
在另一个实施例中,如图14所示,传感器100只检测所需方向上的加速度。止动件108a-d阻止沿检测方向之外的方向运动。硅基片和止动件109阻止板101沿垂直于其平面或表面的方向运动。止动件109需要微型机加工两个多晶硅表面才能制成。
此外,传感器100在另一个实施例中被修正,以便检测两个方向上的加速度,如图15所示。在图15中的检测器100和图11(a)-(c)的传感器100的结构相同,只是包括一个由元件103’-106’构成的附加闭锁机构,以便允许双向闭锁。应该理解,元件103’-106’的操作方式和上述元件103-106相同。
图16所示的闭锁装置表示本发明的另一个实施例。如图所示,板101使弹性悬臂111扰曲,直到检测到预定加速度时,悬臂111通过凸起110,从而闭锁。
图17表明本发明的闭锁加速度计的另一实施例。如图所示,使用两个板或检测质量120和140以便避免在板的延伸部分或阳闭锁件125和悬臂135的扇形端部130之间的任何摩擦接触。在两个板120和140受到预设的加速度时,板140用于推扇形端部130使其离开。两个悬着的板120和140的固有频率被这样选择,使得不用板120的延伸部分125推动扇形端部130便能发生闭锁。
图11(a)-17的加速度闭锁装置是平面内的闭锁装置,这就是说,闭锁发生在硅晶片和检测质量101的平面内,如图18(a)所示。平面外的加速度闭锁装置在垂直于硅晶片和检测质量101的方向上闭锁,如图18(b)所示。在同一晶片上可以包括在平面内和平面外型的几种器件,以便检测X、Y和Z方向上的加速度。然而,(110)整体微型机加工的器件,例如上述的Ciarlo器件只能用于在同一晶片上的平面内的加速度检测(X方向和Y方向)。和平面内闭锁装置类似的平面外闭锁装置100如图19所示。
更具体地说,闭锁悬臂150和由第一多晶硅层和/或金属层构成的检测质量101重叠,如图所示。当检测质量101经受垂直于检测质量101的表面的平面外方向的加速度时,便在固定在基片上的闭锁臂150上产生力,从而使其沿平面外方向偏移。这垂直的悬臂端部155的偏移也将造成在水平方向/在平面内偏移。一旦平面内的偏移大于重叠,悬臂梁150便滑脱检测质量101并闭锁在其下面。
平面外的闭锁装置一般使用2多晶硅表面微型机加工技术制造。此外,虽然现有的(110)整体微型机加工的图21的闭锁装置是不能复位的,这就是说,它不能被释放并重新使用,但是,如结合图20所述的复位机构可以被方便地制造在本发明的表面微型机加工加速度闭锁装置上。应该理解,类似的复位机构可以类似地被装在平面内闭锁装置中。还应该理解,本领域的技术人员在阅读本说明后,容易实现采用热的、双金属的和压电的复位方法。
图20表示按照本发明的平面外的加速度闭锁传感器的顶视图,其中包括复位机构170。复位机构170由静电的梳状驱动装置175构成,如图20所示。为了使器件100复位,制造了静电梳状驱动装置175。在静电梳状驱动装置175上施加一个电位差,使检测质量101被推动离开闭锁悬臂150。这可以相当容易地实现。当检测质量101被推动离开悬臂150的距离大于重叠的距离时,闭锁的悬臂就可以被释放。恢复其初始位置,因而,传感器可以被再使用。
此外,使用所述的表面微型机加工的加速度计可以制造g秒器件。g秒器件和一般的加速度计不同,它响应加速度幅值和其持续的时间的组合。还可以认为这种器件是一种速度闭锁装置,因为它实际上是响应加速度/时间曲线下面的面积。使用粘滞阻尼实现这一特点。通过建立模型合适地选择器件尺寸,并有效地利用黏度阻尼,可以到达多至几十秒的持续时间的g秒要求。
按照本发明图1-20所述的任何传感器,可用于单个的微型机加工传感器,并且当和许多其它传感器结合使用时,可用作检测系统。更具体地说,按照本发明可以完成两种方式的操作:布尔的和准连续的。布尔的操作方式使用一个传感器10,回答真/假的问题:是否超过预设极限?在另一方面,利用许多传感器的准连续操作方式指示检测系统经受的极限范围,而不仅仅是一个极限是否已经超过。在准连续操作方式中使用的系统,通过使用如上所述的完成单个布尔功能的传感器10的阵列,可以指示系统经受的实际极限。在阵列中的每个器件以特定增量检测不同的极限。
例如,以10℃的增量检测极限的4个布尔型传感器10∶100℃,110℃,120℃,和130℃可以被使用。如果这一阵列经受的最大温度是125℃,则100℃,110℃,120℃的传感器则指示它们的设计的温度极限已被超过。然而,130℃的传感器将不指示125℃的温度极限。因此,准连续操作传感器系统将指示,已经发生过120℃和130℃之间的所经受的温度极限。关于加速度和压力的其它例子不再具体说明。不过,本领域的技术人员应该理解,根据上述,用于加速度和压力的相应的准连续系统是容易实现的。
本发明的一个重要的优点在于,不仅可以在一个基片上制造许多传感器,而且可以在其上制造许多类型的传感器。例如,可以在一个基片上制造温度传感器,加速度传感器和压力传感器,这样,可以生产多用途器件。
本发明的实际应用超出了所述的检测技术范围。本发明可用作某种应用下的电开关。
以上说明的仅仅是本发明的具体实施例,并不用于限制本发明。例如,本发明不仅限制于上述的实施例。本领域的技术人员在本发明的范围内可以作出各种改型。
Claims (31)
1.一种微型机械传感器,包括:
机械闭锁装置,在检测到可变化的条件的极限值时被闭锁;
读出机构,用于检测闭锁件是否闭锁;以及,
复位机构,用于以电的方式释放闭锁件,从而使完全由机械方式闭锁的传感器被用电的方式复位,以便重复使用。
2.如权利要求1所述的传感器,其中可变化的条件是环境温度。
3.如权利要求1所述的传感器,其中可变化的条件是加速度。
4.如权利要求1所述的传感器,其中可变化的条件是压力。
5.一种微型机械记忆传感器,包括:
闭锁件,在检测到预定的温度极限时机械地闭锁;以及,
读出机构,用于帮助检测闭锁件是否已闭锁。
6.一种微型机械记忆传感器,包括:
闭锁件,在检测到预定的压力极限时机械地闭锁;以及,
读出机构,用于帮助检测闭锁件是否已闭锁。
7.一种微型机械记忆传感器,包括:
闭锁件,在检测到预定的加速度极限时机械地闭锁;
读出机构,用于帮助检测闭锁件是否已闭锁;以及
复位机构,用于以电的方式释放闭锁件,从而使完全由机械方式闭锁的传感器被用电的方式复位,以便重复使用。
8.一种微型机械记忆传感器,包括:
第一梁,其第一端被基片支撑着,并具有一个第二端;以及,
第二梁,其第一端被基片支撑着,并具有一个第二端,其可弯曲性大于第一梁,在第一结构中,第一和第二梁被这样设置,使得第二梁的第二端在第一梁的第二端与第一梁的第一表面接合,
环境温度的增加助长第一梁的第一偏移和第二梁的第二偏移,按照第一和第二梁的不同的可弯曲性,第二偏移大于第一偏移,以及,
环境温度的减小助长第一和第二梁向第二结构运动,在第二结构中第二梁和第一梁的第二表面接合,使得第二梁闭锁在第一梁上。
9.如权利要求8所述的传感器,其中第一梁包括热电阻,当其通过电流时,助长第一梁的第三偏移,第三偏移大于第一偏移,从而离开第二梁的第二表面,引起电流终止,并使第一和第二梁返回其第一结构。
10.一种微型机械记忆传感器,包括:
由具有第一热胀系数的第一材料和具有第二热胀系数的第二材料制成的第一梁,第二热胀系数和第一热胀系数不同,第一和第二材料被分层设置,并具有一个端部,被形成在基片上,基片延伸到端部之外;以及
第二梁,具有比第一梁大的可弯曲性,在第一结构中被这样设置,使得第二梁对着基片的第一表面,第二梁由第一材料和第二材料制成,
环境温度的增加助长第一梁的第一偏移和第二梁的第二偏移,按照第一和第二梁的不同的可弯曲性和不同的第一第二系数,第二偏移大于第一偏移,以及,
环境温度的减小助长第一和第二梁向第二结构运动,在第二结构中第二梁和基片的第二表面接合,使得第二梁闭锁在第一梁上。
11.如权利要求10所述的传感器,其中第一梁包括热电阻,当其通过电流时,助长第一梁的第三偏移,第三偏移大于第一偏移,从而离开第二梁的第二表面,引起电流终止,并使第一和第二梁返回其第一结构。
12.一种微型机械记忆传感器,包括:
第一梁,具有沿纵向轴线设置的第一长度,第一梁由具有第一热胀系数的第一材料和具有第二热胀系数的第二材料制成,第二热胀系数和第一热胀系数不同,第一和第二材料被分层设置,并具有一个端部,被形成在基片上,基片延伸到端部之外;以及
第二梁,具有沿纵向设置的大于第一长度的第二长度,从而使得在第一结构中,第二梁接合基片的第一表面,第二梁由第一材料和第二材料制成,
环境温度的增加助长第一梁的第一偏移和第二梁的第二偏移,按照第一和第二梁的不同的第一第二长度和不同的第一第二系数,第二偏移大于第一偏移,以及,
环境温度的减小助长第一和第二梁向第二结构运动,在第二结构中第二梁和基片的第二表面接合,使得第二梁闭锁在第一梁上,以及
向第一梁的第二材料提供的电流,用于助长第一梁的第三偏移,第三偏移大于第一偏移,从而使第一梁离开第二梁的第二表面,引起电流终止,并使第一和第二梁返回其第一结构。
13.一种微型机械检测系统,包括:
多个微型机械记忆传感器,每个传感器包括:第一梁,具有沿纵向轴线设置的第一长度,第一梁由具有第一热胀系数的第一材料和具有第二热胀系数的第二材料制成,第二热胀系数和第一热胀系数不同,第一和第二材料被分层设置,并具有一个端部,被形成在基片上,基片延伸到端部之外;以及
第二梁,具有沿纵向轴设置的大于第一长度的第二长度,从而使得在第一结构中,第二梁对着基片的第一表面,第二梁由第一材料和第二材料制成,
环境温度向预定温度的增加助长第一梁的第一偏移和第二梁的第二偏移,按照第一和第二梁的不同的第一第二长度和不同的第一第二系数,第二偏移大于第一偏移,
对于每个传感器所述的预定温度不同,以及
环境温度的减小助长第一和第二梁向第二结构运动,在第二结构中第二梁和基片的第二表面接合,使得第二梁闭锁在第一梁上。
14.如权利要求13所述的系统,其中每个传感器的第一梁包括热电阻,当其通过电流时,助长第一梁的第三偏移,第三偏移大于第一偏移,从而离开第二梁的第二表面,引起电流终止,并使第一和第二梁返回其第一结构。
15.一种微型机械记忆传感器,包括:
第一梁,在其第一端被支撑着,并具有第二个自由端;
第二梁,在其第一端被支撑着,并具有第二个自由端,第二梁的第二端和第一梁的第二端重叠,并且第二梁的第二端具有沿第一方向延伸的检测质量,由传感器经受的加速度引起的检测质量沿第一方向的运动使第二梁弯曲,从而使得当达到加速度的预定值时,使第二梁在第一梁下面闭锁;
读出机构,用于检测传感器释放已闭锁;以及
复位机构,用于以电的方式释放第一和第二梁。
16.一种微型机械记忆传感器,包括;
具有4个角和边的矩形板;
从所述板的第一边延伸的阳闭锁件;
折叠臂,每个的一端连接在4个角的每个上,用于支撑所述的板,其第二端连接于电焊盘上;
和阳闭锁件相对的阴闭锁件;
沿朝向阴闭锁件的第一方向的板的加速度使折叠臂偏移,从而使阳闭锁件朝向阴闭锁件运动,并和其接合,从而允许阳闭锁件沿第一方向运动,而阻止阳闭锁件沿和第一方向相反的第二方向运动。
17.如权利要求16所述的传感器,还包括和板的第二边相对的第一止动件,和板的第三边相对的第二止动件,以及和板的第四边相对的第三止动件,从而只允许板沿第一方向运动。
18.如权利要求16所述的传感器,其中阴闭锁件包括具有和阳闭锁件相应的延伸部分的第二矩形板,当沿第一方向加速时,第二板和延伸部分被偏移。
19.如权利要求16所述的传感器,还包括:
从板的一个平行的第二边延伸的第二阳闭锁件;
和第二阳闭锁件相对的第二阴闭锁件;
沿朝向第二阴闭锁件的第二方向的板的加速度使折叠臂产生第二偏移,从而使第二阳闭锁件朝向第二阴闭锁件运动,并和其接合,从而允许第二阳闭锁件沿第二方向运动,而阻止阳闭锁件沿第一方向运动。
20.如权利要求16所述的传感器,还包括复位机构。
21.如权利要求20所述的传感器,其中的复位机构包括一个静电梳驱动装置。
22.如权利要求17所述的传感器,还包括电复位机构。
23.如权利要求18所述的传感器,还包括电复位机构。
24.如权利要求19所述的传感器,还包括电复位机构。
25.一种微型机械记忆传感器,包括:
具有4个角和边的矩形板;
折叠臂,每个的一端连接在4个角的每个上,用于支撑所述的板,其第二端连接于电焊盘上;
从板的一边延伸的凸起;
和所述凸起对准的和所述一边垂直的弹性悬臂,弹性悬臂的第一端和凸起的第一边重叠,并且沿第一方向和凸起离开一个预定距离;
沿朝向垂直于悬臂的第一方向的板的加速度使折叠臂偏移,从而使凸起朝向第一方向运动,并和悬臂接合并偏移,从而使悬臂和凸起的第二边接合,允许沿第一方向运动,而阻止沿和第一方向相反的第二方向运动。
26.如权利要求25所述的传感器,还包括复位机构。
27.一种微型机械记忆传感器,包括:
具有4个角、边、一个第一表面和一个第二表面的矩形板;
折叠臂,每个的一端连接在4个角的每个上,用于支撑所述的板,其第二端连接于电焊盘上;
具有一个端部的悬臂,它垂直于板的第一边,其端部和板重叠,从而使悬臂对着第一表面;
沿朝向垂直于板的表面的第一方向的板的加速度使折叠臂偏移,从而使板沿第一方向运动,并和悬臂接合并偏移,从而使悬臂和板的第二表面接合。
28.如权利要求27所述的传感器,还包括复位机构。
29.如权利要求27所述的传感器,其中的复位机构包括一个静电梳驱动装置。
30.一种微型机械记忆传感器,包括:
一个膜;
在膜上的第一梁;
在膜上的第二梁,它和第一梁重叠,传感器经受的压力使膜受压,使第一梁和第二梁之间产生相对运动,从而使当压力达到预定值时,第二梁在第一梁下面闭锁;以及
用于检测传感器是否已经闭锁的读出机构。
31.如权利要求30所述的传感器,还包括复位机构,用于以电的方式释放所述的第一和第二梁。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/258,427 US5712609A (en) | 1994-06-10 | 1994-06-10 | Micromechanical memory sensor |
| US08/258,427 | 1994-06-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1168738A true CN1168738A (zh) | 1997-12-24 |
Family
ID=22980506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95194455.XA Pending CN1168738A (zh) | 1994-06-10 | 1995-06-09 | 微型机械记忆传感器 |
Country Status (11)
| Country | Link |
|---|---|
| US (2) | US5712609A (zh) |
| EP (1) | EP0764336A4 (zh) |
| JP (1) | JPH10504894A (zh) |
| CN (1) | CN1168738A (zh) |
| AU (1) | AU702035B2 (zh) |
| BR (1) | BR9507972A (zh) |
| CA (1) | CA2192440A1 (zh) |
| CZ (1) | CZ9603631A3 (zh) |
| PL (1) | PL181071B1 (zh) |
| SI (1) | SI9520065B (zh) |
| WO (1) | WO1995034904A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104345167A (zh) * | 2013-07-31 | 2015-02-11 | 霍尼韦尔国际公司 | 稳健操作通过严重冲击和加速的mems装置机构增强 |
| CN108627181A (zh) * | 2017-03-21 | 2018-10-09 | 罗伯特·博世有限公司 | 传感器装置 |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5712609A (en) * | 1994-06-10 | 1998-01-27 | Case Western Reserve University | Micromechanical memory sensor |
| US6236143B1 (en) * | 1997-02-28 | 2001-05-22 | The Penn State Research Foundation | Transfer having a coupling coefficient higher than its active material |
| US6130464A (en) * | 1997-09-08 | 2000-10-10 | Roxburgh Ltd. | Latching microaccelerometer |
| SE9703969L (sv) * | 1997-10-29 | 1999-04-30 | Gert Andersson | Anordning för mekanisk omkoppling av signaler |
| US6689694B1 (en) | 1998-04-01 | 2004-02-10 | Dong-II Cho | Micromechanical system fabrication method using (111) single crystalline silicon |
| KR100300002B1 (ko) * | 1998-04-01 | 2001-11-22 | 조동일 | (111)단결정실리콘을이용한마이크로머시닝제조방법 |
| US6534711B1 (en) | 1998-04-14 | 2003-03-18 | The Goodyear Tire & Rubber Company | Encapsulation package and method of packaging an electronic circuit module |
| US6543279B1 (en) | 1998-04-14 | 2003-04-08 | The Goodyear Tire & Rubber Company | Pneumatic tire having transponder and method of measuring pressure within a pneumatic tire |
| US6412977B1 (en) | 1998-04-14 | 2002-07-02 | The Goodyear Tire & Rubber Company | Method for measuring temperature with an integrated circuit device |
| US6126311A (en) * | 1998-11-02 | 2000-10-03 | Claud S. Gordon Company | Dew point sensor using mems |
| US6806808B1 (en) | 1999-02-26 | 2004-10-19 | Sri International | Wireless event-recording device with identification codes |
| US7034660B2 (en) * | 1999-02-26 | 2006-04-25 | Sri International | Sensor devices for structural health monitoring |
| US6617963B1 (en) | 1999-02-26 | 2003-09-09 | Sri International | Event-recording devices with identification codes |
| US6518521B1 (en) * | 1999-09-02 | 2003-02-11 | Hutchinson Technology Incorporated | Switchable shunts for integrated lead suspensions |
| US6472739B1 (en) * | 1999-11-15 | 2002-10-29 | Jds Uniphase Corporation | Encapsulated microelectromechanical (MEMS) devices |
| DE10030352A1 (de) * | 2000-06-21 | 2002-01-10 | Bosch Gmbh Robert | Mikromechanisches Bauelement, insbesondere Sensorelement, mit einer stabilisierten Membran und Verfahren zur Herstellung eines derartigen Bauelements |
| AUPQ831100A0 (en) * | 2000-06-22 | 2000-07-13 | Alcatel | Bi-stable microswitch including shape memory alloy latch |
| US6807331B2 (en) * | 2000-09-19 | 2004-10-19 | Newport Opticom, Inc. | Structures that correct for thermal distortion in an optical device formed of thermally dissimilar materials |
| US6307467B1 (en) * | 2000-10-30 | 2001-10-23 | The Goodyear Tire & Rubber Company | Process and apparatus for resetting a micro-mechanical condition sensor |
| US6307477B1 (en) * | 2000-10-30 | 2001-10-23 | The Goodyear Tire & Rubber Company | Process and apparatus for resetting a directly resettable micro-mechanical temperature memory switch |
| US6473361B1 (en) * | 2000-11-10 | 2002-10-29 | Xerox Corporation | Electromechanical memory cell |
| US6906511B2 (en) * | 2001-05-08 | 2005-06-14 | Analog Devices, Inc. | Magnetic position detection for micro machined optical element |
| US7183633B2 (en) * | 2001-03-01 | 2007-02-27 | Analog Devices Inc. | Optical cross-connect system |
| US6400261B1 (en) | 2001-03-29 | 2002-06-04 | The Goodyear Tire & Rubber Company | Method of monitoring a tire condition using a drive over reader |
| US6683537B2 (en) | 2001-03-29 | 2004-01-27 | The Goodyear Tire And Rubber Company | System of apparatus for monitoring a tire condition value in a pneumatic tire |
| US6872896B1 (en) * | 2001-09-12 | 2005-03-29 | Hutchinson Technology Incorporated | Elongated bridge shunt |
| US6710417B2 (en) * | 2001-09-27 | 2004-03-23 | Seagate Technology Llc | Armor coated MEMS devices |
| CN100504327C (zh) * | 2001-10-04 | 2009-06-24 | Nxp股份有限公司 | 具有用来表示影响数据载体的参数变化的指示装置的数据载体 |
| FR2830620B1 (fr) * | 2001-10-05 | 2004-01-16 | Thales Sa | Dispositif de securisation du deplacement d'un organe mobile |
| US7015826B1 (en) * | 2002-04-02 | 2006-03-21 | Digital Angel Corporation | Method and apparatus for sensing and transmitting a body characteristic of a host |
| GB2387480B (en) * | 2002-04-09 | 2005-04-13 | Microsaic Systems Ltd | Micro-engineered self-releasing switch |
| DE10235369A1 (de) * | 2002-08-02 | 2004-02-19 | Robert Bosch Gmbh | Mikromechanischer Schalter |
| US7190245B2 (en) * | 2003-04-29 | 2007-03-13 | Medtronic, Inc. | Multi-stable micro electromechanical switches and methods of fabricating same |
| CN1297470C (zh) * | 2003-07-28 | 2007-01-31 | 华新丽华股份有限公司 | 采用微结构间隙控制技术形成的结构及其形成方法 |
| DE10348335B4 (de) * | 2003-10-17 | 2013-12-24 | Universität Ulm | Brückenförmiges Mikrobauteil mit einem bimetallischen Biegeelement |
| US20050101843A1 (en) * | 2003-11-06 | 2005-05-12 | Welch Allyn, Inc. | Wireless disposable physiological sensor |
| US7038150B1 (en) * | 2004-07-06 | 2006-05-02 | Sandia Corporation | Micro environmental sensing device |
| US7619346B2 (en) * | 2005-05-13 | 2009-11-17 | Evigia Systems, Inc. | Method and system for monitoring environmental conditions |
| US7349236B2 (en) * | 2005-06-24 | 2008-03-25 | Xerox Corporation | Electromechanical memory cell with torsional movement |
| US20070096860A1 (en) * | 2005-11-02 | 2007-05-03 | Innovative Micro Technology | Compact MEMS thermal device and method of manufacture |
| US20090314616A1 (en) * | 2006-01-20 | 2009-12-24 | Joachim Oberhammer | Swtich, Method and System For Switching The State of a Signal Path |
| US8677802B2 (en) * | 2006-02-04 | 2014-03-25 | Evigia Systems, Inc. | Sensing modules and methods of using |
| US20110009773A1 (en) * | 2006-02-04 | 2011-01-13 | Evigia Systems, Inc. | Implantable sensing modules and methods of using |
| US7604398B1 (en) | 2007-03-26 | 2009-10-20 | Akers Jeffrey W | Remote indicating cumulative thermal exposure monitor and system for reading same |
| WO2009158141A1 (en) * | 2008-05-30 | 2009-12-30 | The Trustees Of The University Of Pennsylvania | Piezoelectric aln rf mem switches monolithically integrated with aln contour-mode resonators |
| US8304274B2 (en) * | 2009-02-13 | 2012-11-06 | Texas Instruments Incorporated | Micro-electro-mechanical system having movable element integrated into substrate-based package |
| KR101248185B1 (ko) * | 2011-02-23 | 2013-03-27 | 서강대학교산학협력단 | 무선충전 압력센서 및 그 제조 방법 |
| JP5803615B2 (ja) * | 2011-11-29 | 2015-11-04 | 富士通株式会社 | 電子デバイスとその製造方法 |
| US9047985B2 (en) | 2012-10-19 | 2015-06-02 | Infineon Technologies Dresden Gmbh | Apparatus, storage device, switch and methods, which include microstructures extending from a support |
| US9562825B2 (en) | 2014-11-07 | 2017-02-07 | Nxp Usa, Inc. | Shock sensor with latch mechanism and method of shock detection |
| DE102018207319B4 (de) * | 2018-05-09 | 2022-08-25 | Infineon Technologies Ag | MEMS-Struktur und Verfahren zum Erfassen einer Änderung eines Parameters |
| WO2023211431A1 (en) * | 2022-04-27 | 2023-11-02 | Nikon Corporation | Flexible accelerometer configured to detect threshold acceleration |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3294927A (en) * | 1965-02-01 | 1966-12-27 | George A Hill | Resilient flap element for switch apparatus |
| US3593249A (en) * | 1969-05-22 | 1971-07-13 | Bel Aire Sales Corp | Circuit breaker with bimetallic element |
| US3771368A (en) * | 1971-02-22 | 1973-11-13 | Singer Co | Multi-output integrating accelerometer |
| US4016766A (en) * | 1971-04-26 | 1977-04-12 | Systron Donner Corporation | Counting accelerometer apparatus |
| US3706952A (en) * | 1972-02-02 | 1972-12-19 | Gen Electric | Automatically resettable thermal switch |
| US3832702A (en) * | 1972-03-20 | 1974-08-27 | Gte Sylvania Inc | Latching means for sensing apparatus |
| US3761855A (en) * | 1972-04-27 | 1973-09-25 | Bell Telephone Labor Inc | Latching switch |
| US3743977A (en) * | 1972-04-27 | 1973-07-03 | Bell Telephone Labor Inc | Latching switch |
| US3852546A (en) * | 1973-03-06 | 1974-12-03 | Westinghouse Electric Corp | Pressure actuable switch apparatus with bellows and fluid damping means |
| US4071338A (en) * | 1976-01-27 | 1978-01-31 | Physical Systems, Inc. | Air exhausted mixing bowl |
| US4255629A (en) * | 1979-04-09 | 1981-03-10 | Technar Incorporated | Crash and rollover cutoff switch |
| US4284862A (en) * | 1980-03-20 | 1981-08-18 | The United States Of America As Represented By The Secretary Of The Army | Acceleration switch |
| US4353259A (en) * | 1980-10-15 | 1982-10-12 | Calspan Corporation | Fiber optic acceleration sensor |
| US4544988A (en) * | 1983-10-27 | 1985-10-01 | Armada Corporation | Bistable shape memory effect thermal transducers |
| US4543457A (en) * | 1984-01-25 | 1985-09-24 | Transensory Devices, Inc. | Microminiature force-sensitive switch |
| US4959515A (en) * | 1984-05-01 | 1990-09-25 | The Foxboro Company | Micromechanical electric shunt and encoding devices made therefrom |
| US4574168A (en) * | 1984-06-27 | 1986-03-04 | The United States Of America As Represented By The United States Department Of Energy | Multiple-stage integrating accelerometer |
| US4570139A (en) * | 1984-12-14 | 1986-02-11 | Eaton Corporation | Thin-film magnetically operated micromechanical electric switching device |
| US4737660A (en) * | 1986-11-13 | 1988-04-12 | Transensory Device, Inc. | Trimmable microminiature force-sensitive switch |
| GB8707854D0 (en) * | 1987-04-02 | 1987-05-07 | British Telecomm | Radiation deflector assembly |
| SE8801299L (sv) * | 1988-04-08 | 1989-10-09 | Bertil Hoeoek | Mikromekanisk envaegsventil |
| US4891255A (en) * | 1988-09-29 | 1990-01-02 | The United States Of America As Represented By The United States Department Of Energy | (110) Oriented silicon wafer latch accelerometer and process for forming the same |
| US5049775A (en) * | 1988-09-30 | 1991-09-17 | Boston University | Integrated micromechanical piezoelectric motor |
| DE3844669A1 (de) * | 1988-12-09 | 1990-06-13 | Fraunhofer Ges Forschung | Mikromechanische einrichtung |
| US5072288A (en) * | 1989-02-21 | 1991-12-10 | Cornell Research Foundation, Inc. | Microdynamic release structure |
| US5001933A (en) * | 1989-12-26 | 1991-03-26 | The United States Of America As Represented By The Secretary Of The Army | Micromechanical vibration sensor |
| US5126812A (en) * | 1990-02-14 | 1992-06-30 | The Charles Stark Draper Laboratory, Inc. | Monolithic micromechanical accelerometer |
| US5038006A (en) * | 1990-03-21 | 1991-08-06 | Lowe Sr Alvin E | Electrical switch |
| US5166612A (en) * | 1990-11-13 | 1992-11-24 | Tektronix, Inc. | Micromechanical sensor employing a squid to detect movement |
| US5177331A (en) * | 1991-07-05 | 1993-01-05 | Delco Electronics Corporation | Impact detector |
| US5164558A (en) * | 1991-07-05 | 1992-11-17 | Massachusetts Institute Of Technology | Micromachined threshold pressure switch and method of manufacture |
| DE4126107C2 (de) * | 1991-08-07 | 1993-12-16 | Bosch Gmbh Robert | Beschleunigungssensor und Verfahren zur Herstellung |
| US5712609A (en) * | 1994-06-10 | 1998-01-27 | Case Western Reserve University | Micromechanical memory sensor |
-
1994
- 1994-06-10 US US08/258,427 patent/US5712609A/en not_active Expired - Fee Related
-
1995
- 1995-06-09 AU AU28217/95A patent/AU702035B2/en not_active Ceased
- 1995-06-09 EP EP95923778A patent/EP0764336A4/en not_active Withdrawn
- 1995-06-09 PL PL95317706A patent/PL181071B1/pl unknown
- 1995-06-09 CN CN95194455.XA patent/CN1168738A/zh active Pending
- 1995-06-09 CZ CZ19963631A patent/CZ9603631A3/cs unknown
- 1995-06-09 CA CA002192440A patent/CA2192440A1/en not_active Abandoned
- 1995-06-09 SI SI9520065A patent/SI9520065B/sl unknown
- 1995-06-09 JP JP8502347A patent/JPH10504894A/ja not_active Expired - Lifetime
- 1995-06-09 WO PCT/US1995/007335 patent/WO1995034904A1/en not_active Application Discontinuation
- 1995-06-09 BR BR9507972A patent/BR9507972A/pt not_active Application Discontinuation
-
1997
- 1997-06-04 US US08/868,705 patent/US5966066A/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104345167A (zh) * | 2013-07-31 | 2015-02-11 | 霍尼韦尔国际公司 | 稳健操作通过严重冲击和加速的mems装置机构增强 |
| CN108627181A (zh) * | 2017-03-21 | 2018-10-09 | 罗伯特·博世有限公司 | 传感器装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0764336A4 (en) | 1999-04-07 |
| US5712609A (en) | 1998-01-27 |
| SI9520065B (sl) | 1998-10-31 |
| CA2192440A1 (en) | 1995-12-21 |
| PL181071B1 (pl) | 2001-05-31 |
| SI9520065A (en) | 1997-08-31 |
| PL317706A1 (en) | 1997-04-28 |
| AU702035B2 (en) | 1999-02-11 |
| CZ9603631A3 (cs) | 2002-06-12 |
| WO1995034904A1 (en) | 1995-12-21 |
| EP0764336A1 (en) | 1997-03-26 |
| US5966066A (en) | 1999-10-12 |
| AU2821795A (en) | 1996-01-05 |
| MX9606277A (es) | 1998-03-31 |
| JPH10504894A (ja) | 1998-05-12 |
| BR9507972A (pt) | 1997-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1168738A (zh) | 微型机械记忆传感器 | |
| US6797631B2 (en) | High sensitive micro-cantilever sensor and fabricating method thereof | |
| KR101910867B1 (ko) | 차동 콤 드라이브 mems를 위한 시스템 및 방법 | |
| Comtois et al. | Electrothermal actuators fabricated in four-level planarized surface micromachined polycrystalline silicon | |
| Nguyen et al. | A polymeric microgripper with integrated thermal actuators | |
| US8861218B2 (en) | Device containing plurality of smaller MEMS devices in place of a larger MEMS device | |
| US6130464A (en) | Latching microaccelerometer | |
| JPH06503423A (ja) | 力を検出しまたは力を印加するマイクロ素子とその製造法 | |
| Jia et al. | Micro-cantilever shocking-acceleration switches with threshold adjusting and ‘on’-state latching functions | |
| JP4691112B2 (ja) | 接点装置およびその製造方法 | |
| JP2012242398A (ja) | 環境的影響力を測定するためのデバイスおよび同デバイスを製作する方法 | |
| WO2006123788A1 (ja) | Mems素子、memsデバイス、およびmems素子の製造方法 | |
| CN102185517A (zh) | 静电致动器 | |
| US6246155B1 (en) | Bimorph piezoelectric device for acceleration sensor and method of its manufacture | |
| US5623147A (en) | Radiation-sensitive detector | |
| TW562945B (en) | Pick and place mechanism for contactor | |
| WO2011136312A1 (ja) | 振動発電デバイスおよびその製造方法 | |
| Aslam | Bulk etching of silicon wafer and development of a polyimide membrane | |
| JP2003181976A (ja) | 積層体、開閉器、検出装置、接合部、配線、静電アクチュエータ、キャパシタ、計測装置及び無線機 | |
| KR20030013130A (ko) | 고감도 초소형 캔틸레버 센서 및 제조 방법 | |
| Sato et al. | Novel MEMS power generator with integrated thermoelectric and vibrational devices | |
| US6550116B2 (en) | Method for manufacturing a bimorph piezoelectric device for acceleration sensor | |
| Esashi | Micro/nano electro mechanical systems for practical applications | |
| KR100787598B1 (ko) | 프로브 유닛 및 그 제조 방법 | |
| JP2007003373A (ja) | 圧電加速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |